很多人还没意识到。
未来几年,实验室里最先普及的,可能不是更贵的机器人,也不是更复杂的机械臂,而是一个更基础的能力:
低成本、稳定、可重复的数据采集能力。
一、很多实验室还在靠“人手转”
最近我们接触了不少高校实验室、AI视觉团队、机器人团队,发现一个很真实的现象:
设备越来越贵了,项目越来越大了,但很多基础采集工作,居然还在靠人手完成。
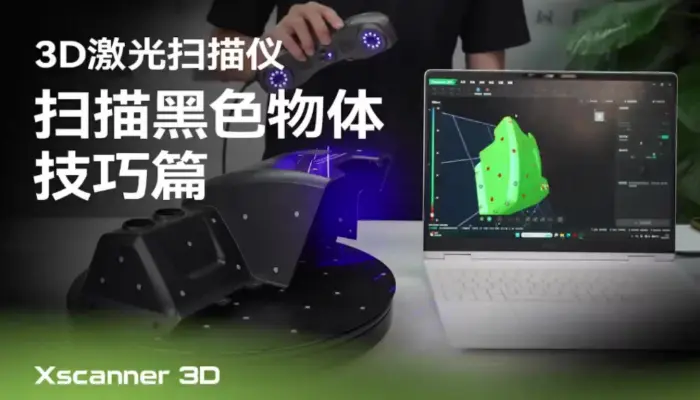
做三维扫描,靠人手转模型。
做AI视觉训练,靠人手转物体。
做点云采集,靠人手调角度。
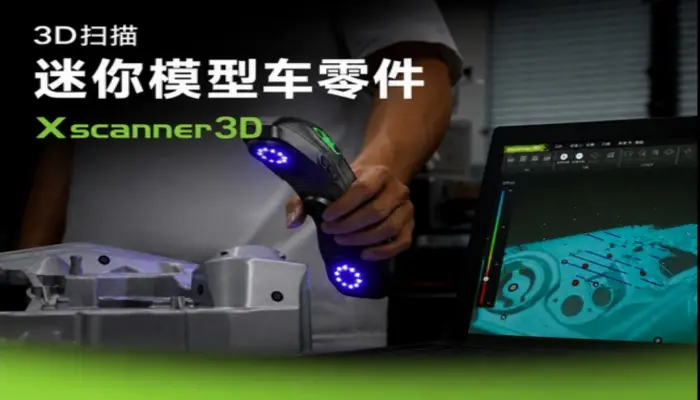
做工业件建模,靠人手慢慢摆。
这就形成了一个很矛盾的场景:
高端算法 + 原始操作。
二、真正影响数据质量的,是采集过程
尤其在这些方向里:
- AI视觉识别
- 三维扫描
- 点云采集
- NeRF
- Gaussian Splatting
- 机器人视觉
- 数字孪生
- 工业件逆向建模
很多人都在关注算法、模型和软件,但容易忽略一个基础问题:
采集过程是否稳定。
如果物体旋转不均匀,后面就可能出现:
角度不一致、点云错层、模型漂移、纹理错位、训练数据不稳定。
最后问题看起来像是算法问题,其实源头可能是采集环节不够稳定。

三、为什么实验室需要一个稳定的旋转平台?
现在很多实验室会遇到三个问题:
第一,工业转台太贵。
第二,普通摄影转盘承重不够。
第三,DIY方案太折腾。
很多老师和学生最后把时间浪费在调电机、接线、改结构、修控制上。
但实验室真正需要的,其实是一个简单直接的工具:
放上去,能稳定转;充好电,直接用;不需要重复折腾。
四、我们这次做的不是普通展示转盘
这次的电动旋转平台,更偏实验室和工业辅助场景。
它的核心特点很直接:
支持50Kg承重。
这意味着它不是只能放手办、小模型的小转盘,而是可以放置:
- 工业零件
- 机器人部件
- 发动机模型
- 雕塑样件
- 大型扫描工件
- 实验室测试样品
对于三维扫描、AI视觉采集、工业件建模来说,承重能力非常关键。
五、无线使用,解决实验室“线太乱”的问题
实验室里最烦的是什么?
很多时候不是设备不够,而是线太多。
尤其是旋转类设备,如果一边旋转一边拖线,桌面会非常乱,使用也不方便。
所以这个平台采用充电使用的方式。
看起来只是一个小细节,但真正放到实验室环境里,会明显提升使用体验。
少一根线,就少一个干扰点。
六、它真正的价值,是进入数字化制造工作流
现在越来越多高校实验室,已经不只是单独做扫描、单独做建模、单独做加工。
趋势正在变成一条完整链路:
实物采集 → 三维扫描 → 数字建模 → AI处理 → 自动刀路 → 五轴加工
以前这套流程看起来很复杂,现在正在变得越来越桌面化。
而旋转平台,就是这条工作流里容易被忽略,但非常关键的一环。
因为没有稳定采集,后面的建模、训练、加工都会受到影响。
七、实验室升级,可能先从“小工具”开始
很多人以为实验室升级,一定是先买大设备。
但我们接触下来发现,很多实验室真正缺的,反而是这些能提高效率的小型辅助设备。
它不一定最贵,但很高频。
它不一定最复杂,但很实用。
它不一定最显眼,但能直接影响工作流效率。
一个稳定、省事、开箱即用的旋转平台,对实验室来说,价值不只是“能转”。
而是让采集过程更稳定,让实验流程更顺畅。
八、适合哪些人关注?
如果你正在做这些方向,可以重点关注:
- 高校实验室建设
- AI视觉
- 机器人视觉
- 三维扫描
- 点云采集
- 数字孪生
- 工业件逆向
- 文物数字化
- 桌面数字化制造
- 创客空间 / 工程训练中心
这类设备未来很可能会越来越常见。
因为AI视觉和数字化制造真正融合以后,大家会发现:
稳定采集,是所有数字化工作的第一步。
九、欢迎交流真实应用场景
后面我们也会持续分享一些真实应用案例,包括:
三维扫描、AI视觉采集、点云建模、自动化采集、桌面五轴加工、数字化制造工作流等内容。
如果你现在正好在做高校实验室、AI视觉、机器人、三维扫描、数字化制造相关方向,欢迎加我交流。
也欢迎把这篇文章转给身边做实验室建设、AI视觉、机器人、三维扫描的朋友。
也许他们现在正缺这样一个工具。
下一波实验室升级,可能不是先升级大设备,而是先升级工作流。